高光谱全色融合是指融合具有高光谱、低空间分辨率的高光谱影像、以及高空间分辨率的单波段全色影像,来得到具有高光谱、高空间分辨率的影像,这是提升高光谱空间分辨率的一种有效的方式。
然而现有的融合方法主要关注于小比例融合任务(即高光谱和全色影像的空间分辨率比值),缺乏实际应用性。如资源一号02D卫星获取的高光谱影像具有166个波段,空间分辨率为30m,而全色影像空间分辨率为2.5m,二者分辨率之比达到12。针对这类大比例分辨率,目前还没有很好的研究成果。
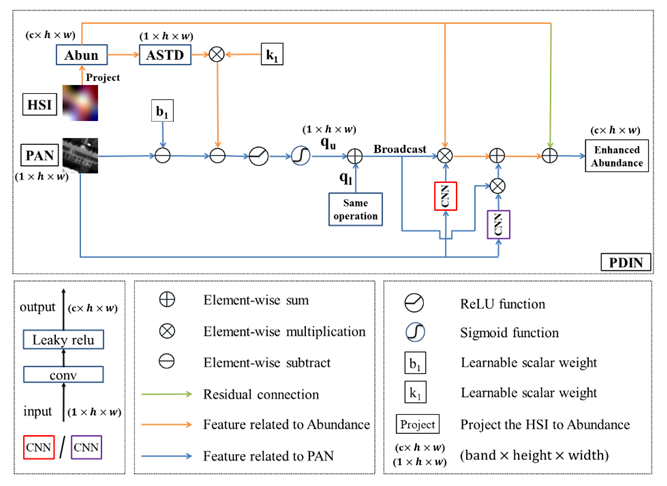
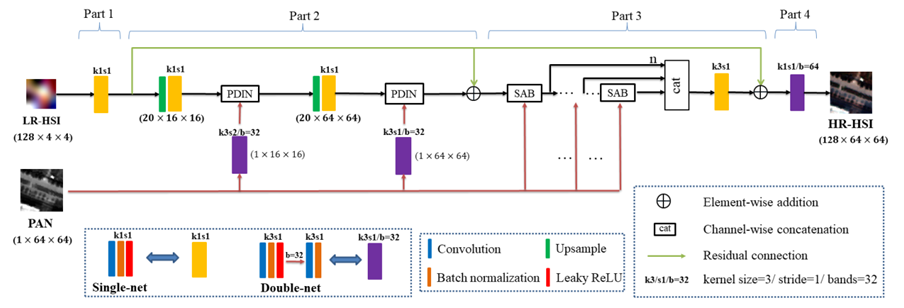
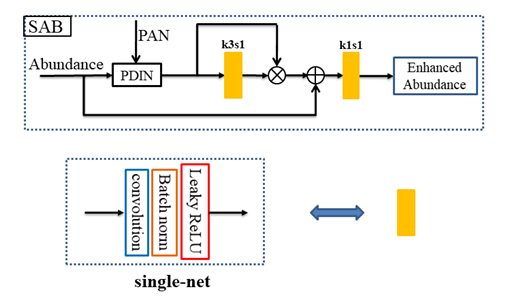
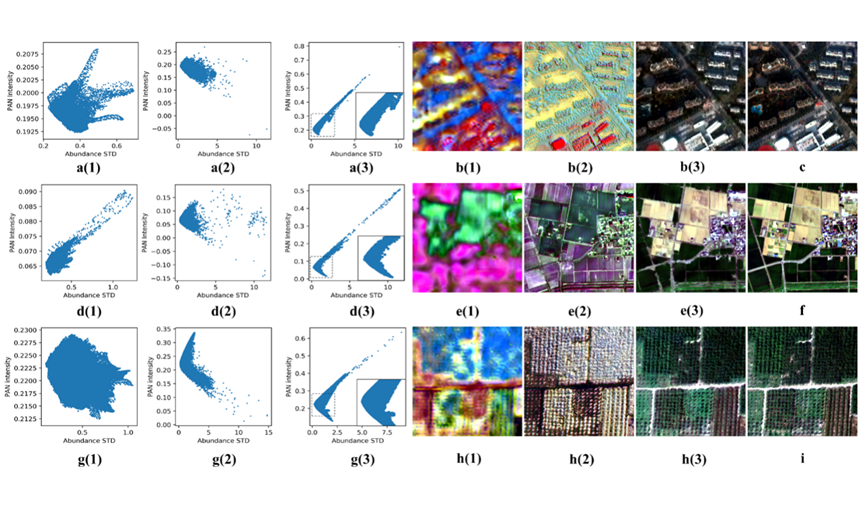
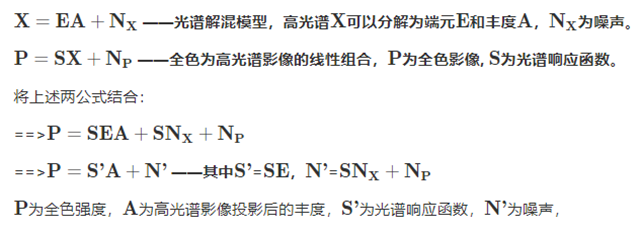
因此本文基于飞桨框架首次聚焦于大比例融合任务(比例为16),并针对融合问题的病态性(即从单波段全色影像预测多波段高光谱影像的反射率),本文提出了一种基于高光谱投影丰度空间的融合网络。此外,根据全色强度和丰度特征之间的线性和非线性的关系,还设计了细节注入的子网络来将全色细节注入到低维的丰度空间而非原始高维空间,有效地缓解了该融合问题的病态性,提升了融合影像的质量。
技术方案
1import numpy as np
2import matplotlib.pyplot as plt
3srf_pan = np.load('/home/aistudio/data/data124050/srf_pan.npy') # 光谱响应函数
4
5filename = '/home/aistudio/work/file/envi_plot3.txt' # 选择的各种地物纯净光谱
6curve_data =np.loadtxt(filename, skiprows=13)[:, 1:]
7
8pixel_num = 5000
9abun = np.random.rand(pixel_num, curve_data.shape[1])
10abun_sum = np.sum(abun, axis=1)
11abun = abun / np.expand_dims(abun_sum, axis=1)
12
13intensity = np.dot(srf_pan, np.dot(curve_data[:, :], np.transpose(abun))[:srf_pan.shape[0], :]) / np.sum(srf_pan)
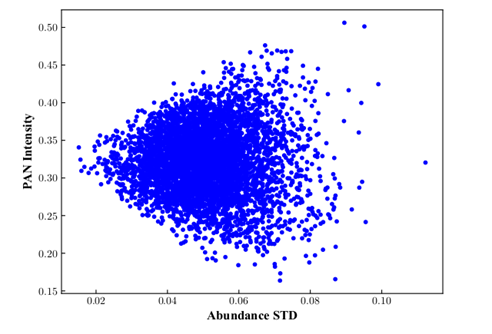
14x_var = np.std(abun, axis=1) # 每个像元端元丰度的标准差
15
16plt.scatter(x_var, intensity, color='b', s=10)
17plt.xlabel('Abundance STD')
18plt.ylabel('PAN Intensity')
19plt.show()
1# 利用线性关系和非线性关系构建的融合网络
2class pan_abunstd(nn.Layer):
3 def __init__(self, endmember_num=30):
4 super(pan_abunstd, self).__init__()
5 self.multiply_weight = simple_net_res(1, endmember_num, kernelsize=3) # 乘性权重,改变方差
6 self.plus_weight = simple_net_res(1, endmember_num, kernelsize=3) # 加性权重,改变均值
7
8 def forward(self, w1, w2, b1, b2, pan, abun, dim_band=1):
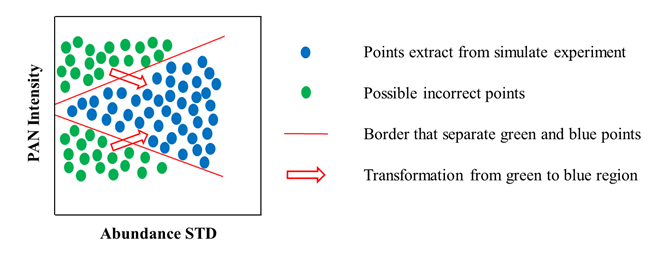
9 update_weight = F.sigmoid(F.relu(pan - w1 * paddle.std(abun, axis=1, keepdim=True) - b1)) # 应该更新的位置权重
10 update_weight2 = F.sigmoid(F.relu(w2 * paddle.std(abun, axis=1, keepdim=True) + b2 - pan))
11 update_weight = update_weight + update_weight2
12 result0 = self.multiply_weight(pan) * update_weight * abun + self.plus_weight(pan) * update_weight
13 return result0 + abun
Part 4为解码部分,即将丰度特征还原为高光谱影像。值得注意的是,这部分的卷积参数可以看成线性混合模型中的端元。
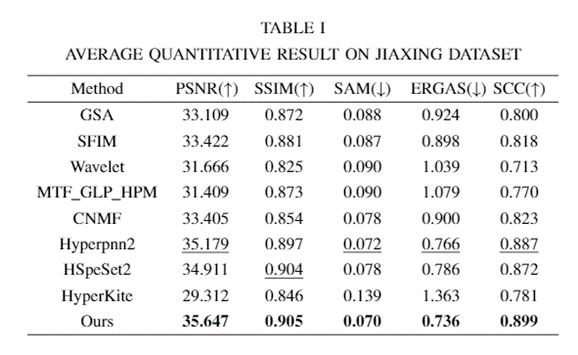
实验结果
1def generate_data(path, path_srf): # 第一步
2 ratio_hs = 16
3 # spectral response function of worldview2
4 srf_pan = np.expand_dims(np.expand_dims(np.load(path_srf), axis=-1), axis=-1)
5
6 noise_mean = 0.0
7 noise_var = 0.0001
8 dowmsample16 = Downsampler(ratio_hs) # 高斯核降采样
9 original_msi = np.float32(np.load(path))
10 band, row, col = original_msi.shape
11original_msi = original_msi[:, :(row - row%(ratio_hs*4)), :(col - col%(ratio_hs*4))]
12
13 # ratio 16
14 temp_blur = dowmsample16(paddle.to_tensor(np.expand_dims(original_msi, axis=0), dtype='float32'))
15 print(temp_blur.shape)
16 temp_blur = np.squeeze(temp_blur.numpy())
17 _, rows, cols = temp_blur.shape
18 blur_data = []
19 for i3 in range(temp_blur.shape[0]): # 加入噪声
20 blur_data.append(np.expand_dims(temp_blur[i3, :, :] +
21 np.random.normal(noise_mean, noise_var ** 0.5, [rows, cols]), axis=0))
22 blur_data = np.concatenate(blur_data, axis=0)
23 print('blur_data.shape:' + str(blur_data.shape))
24
25 # simulated pan image
26 temp_pan = np.expand_dims(np.sum(original_msi * srf_pan, axis=0) / np.sum(srf_pan), axis=0)
27 print('temp_pan.shape:' + str(temp_pan.shape))
28
29 return original_msi, temp_blur, temp_pan
30
31def crop_data(hrhs, lrhs, pan, ratio=16, train_ratio=0.8): # 第二步
32 training_size = 64 # training patch size
33 testing_size = 256 # testing patch size
34 idx = int(lrhs.shape[2] * train_ratio) # 切割的坐标索引值
35
36 '''产生训练和测试数据'''
37 train_hs_image, train_hrpan_image, train_label = \
38 Crop_traindata(lrhs[:, :, :idx],
39 pan[:, :, :idx*ratio],
40 hrhs[:, :, :idx*ratio],
41 ratio=ratio, size=training_size,
42 test=False)
43 test_hs_image, test_hrpan_image, test_label = \
44 Crop_traindata(lrhs[:, :, idx:],
45 pan[:, :, idx*ratio:],
46 hrhs[:, :, idx*ratio:],
47 ratio=ratio, size=testing_size,
48 test=True)
49 return train_hs_image, train_hrpan_image, train_label, test_hs_image, test_hrpan_image, test_label
1# 定义数据和模型
2dataset0 = Mydata(train_hs_image, train_hrpan_image, train_label) # 训练数据
3train_loader = paddle.io.DataLoader(dataset0, num_workers=0, batch_size=opt.batch_size,
4 shuffle=True, drop_last=True)
5
6dataset1 = Mydata(test_hs_image, test_hrpan_image, test_label) # 测试数据
7test_loader = paddle.io.DataLoader(dataset1, num_workers=0, batch_size=opt.test_batch_size,
8 shuffle=False, drop_last=False)
9
10model = Pg_net(band=opt.in_nc, endmember_num=opt.endmember, ratio=ratio)
11
12L2_loss = nn.loss.MSELoss() # loss 函数
13samloss = SAMLoss()
14
15scheduler = optim.lr.StepDecay(opt.lr, opt.step, gamma=opt.momentum, verbose=False) # 学习率调整
16optimizer = optim.Adam(learning_rate=scheduler, parameters=model.parameters())
17for epoch in range(opt.num_epochs):
18 time0 = time.time()
19 loss_total = 0.0
20
21 scheduler.step(epoch)
22 model.train()
23 for i, (images_hs, images_pan, labels) in enumerate(train_loader()):
24 result = model(images_hs, images_pan)
25
26 loss_l2 = L2_loss(result, labels)
27 loss_sam = samloss(result, labels)
28 loss = loss_l2 + 0.01*loss_sam
29
30 loss.backward()
31 optimizer.step()
32 optimizer.clear_gradients()
33 loss_total += loss.numpy()
34
35 if ((epoch+1) % 10) == 0:
36 print('epoch %d of %d, using time: %.2f , loss of train: %.4f' %
37 (epoch + 1, opt.num_epochs, time.time() - time0, loss_total))
38
39# 测试结果输出:
40model.eval()
41image_all = []
42with paddle.no_grad():
43 for (images_hs, images_pan, _) in test_loader:
44 outputs_temp = model(images_hs, images_pan)
45 image_all.append(outputs_temp)
46 a = paddle.concat(image_all, axis=0)
47return a
数据分布变换假设的验证
结论
欢迎fork项目,一起交流学习:
项目链接
https://aistudio.baidu.com/aistudio/projectdetail/3383847
论文链接
https://ieeexplore.ieee.org/document/9676675
相关阅读
关注【飞桨PaddlePaddle】公众号
获取更多技术内容~