自动驾驶环境感知
当今时代,通过科技改变生产生活方式的各种先进技术纷纷崛起,交通产业也经历着巨大的变革。国家对于智能交通、交通强国战略的支持使得交通产业更加需要相关技术支撑与赋能。对此,百度Apollo与飞桨强强联合,聚焦人工智能关键技术,深耕核心和底层技术,持续开源。在自动驾驶技术各个方面深耕和发力,以全行业的前行为目标,吸纳各方力量,不断拓宽开源之路。Apollo开放平台与飞桨在全球自动驾驶技术及深度学习开源生态中具有深刻影响力,为自动驾驶及深度学习技术研发与创新提供了肥沃土壤,也为开发者创新和落地提供更广阔的想象空间。
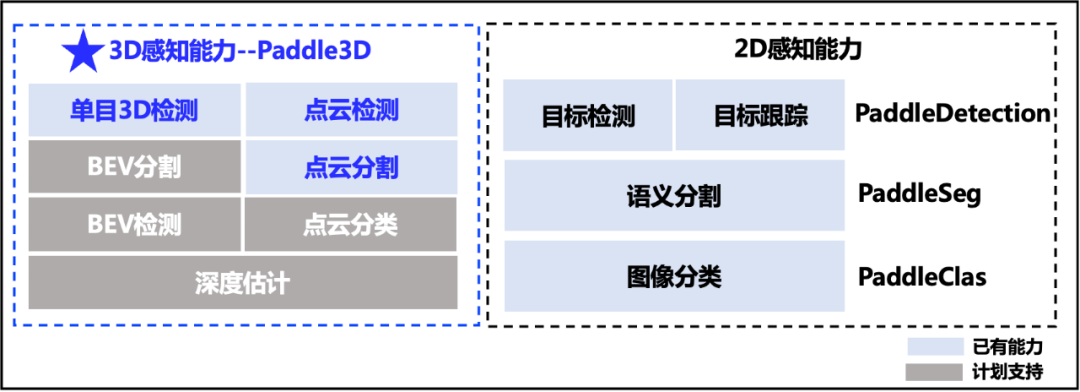
自动驾驶环境感知能力全景
为了进一步降低开发者开发难度,同时方便开发者根据自己的实际场景对模型进行修改和迭代,此次飞桨携手Apollo开放平台基于大量业务实践经验,针对自动驾驶感知模块提供了一系列能力。其中3D视觉能力是本次发布的重点,飞桨3D视觉开发套件Paddle3D不仅覆盖了单目、点云等多种模态以及检测、分割等多种任务类型,同时支持模型一键预测部署,并与Apollo开放平台实现训练部署无缝衔接,使开发者使用更便捷!
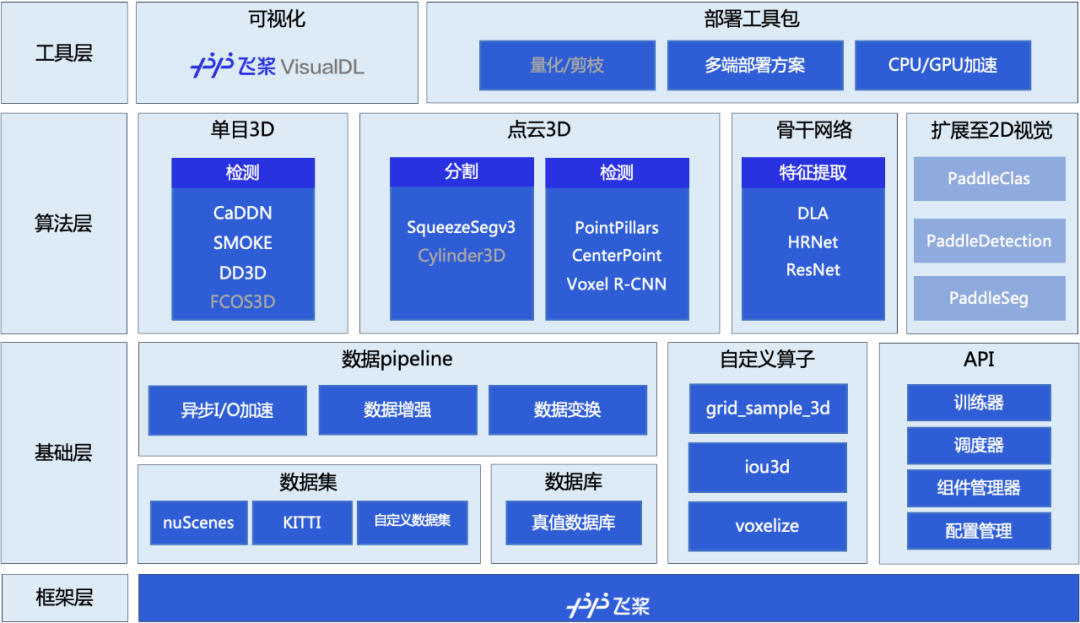
Paddle3D全景图
话不多说,直接上手试试吧!
https://github.com/PaddlePaddle/Paddle3D
⭐记得Star收藏⭐
作为支撑自动驾驶界感知开发模块中3D视觉能力的重要组件,Paddle3D拥有以下五大特性:
丰富的模型库
聚合主流3D感知算法及精度调优策略,覆盖单目、点云等多种模态及检测、分割等多种任务类型;
灵活的框架设计
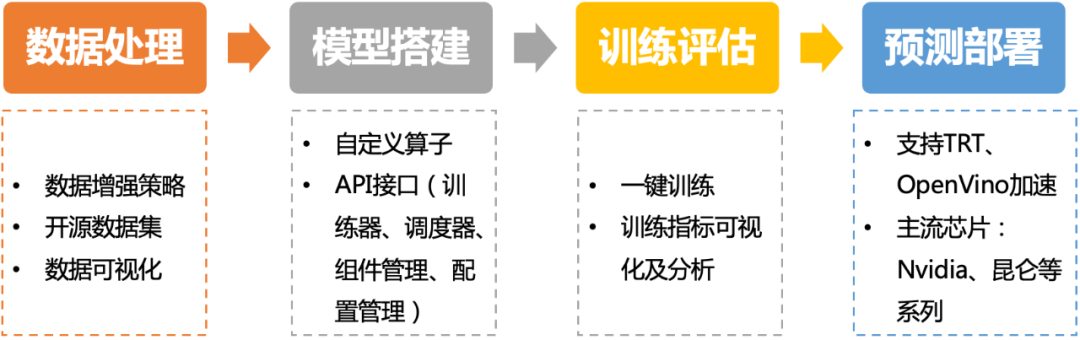
端到端全流程
支持KITTI、nuScenes等主流3D数据集,提供从数据处理、模型搭建、训练调优到部署落地的全流程能力;
产业级部署方案
极致优化模型性能,适配多种自动驾驶主流芯片。支持计算图优化、TensorRT/OpenVINO等加速库,并提供了开箱即用的部署教程,5分钟即可完成模型部署;
无缝衔接Apollo
特性一 丰富的模型库
Paddle3D精选业界主流前沿3D感知算法,支持单目、点云等不同模态以及检测、分割等多种任务类型。
在业务实践中实现精度和速度的全面优化,提供了同一模型在各类数据集上进行优化的不同配置,并提供预训练模型,充分满足不同应用场景下的用户需求,更好地实现精度和速度的平衡。
 Paddle3D模型库
Paddle3D模型库
特性二 灵活的框架设计
对于期望对模型进行二次开发或者有系统集成需求的用户来说,可以直接使用API接口进行集成。Paddle3D将模型组网、数据增强、训练流水线、数据集、任务调度等相关功能都进行了抽象封装,支持用户快速便捷地进行二次开发或者集成到其他任务中。
以CaDDN模型为例子,我们通过使用PaddleSeg复现的OCRNet模型作为分割backbone,在不增加推理速度的情况下,将模型的推理精度从7.211% mAP提升到了 7.861%。
特性三 端到端全流程
Paddle3D在打通流程的基础上,还基于业务实践进行了许多功能拓展。以数据处理环节为例子,神经网络成功的关键因素之一是具备大量的数据,而自动驾驶下点云数据的获取与标注的成本极高,在常规的旋转、缩放等数据增强策略外,Paddle3D还支持基于开源数据集制作离线的真值数据库,训练时可以将真值数据库中的多类别样本拓展到真实点云数据中,有效提升训练效果。
 Paddle3D全流程示例
Paddle3D全流程示例
特性四 产业级部署方案
此外Paddle3D对每个模型都提供开箱即用的部署教程,详细描述了从环境准备、代码编译到执行等各个环节,开发者在5分钟之内即可上手完成模型部署。
特性五 无缝衔接Apollo
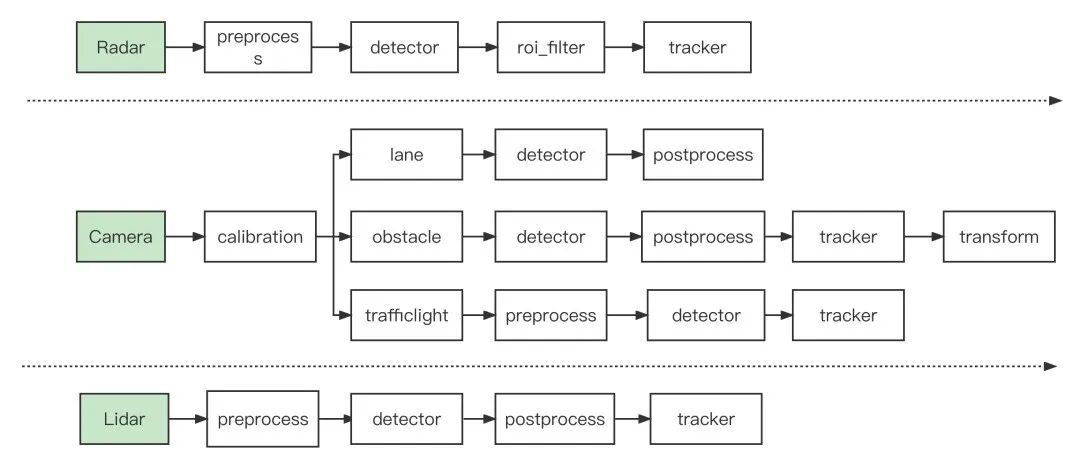
Apollo感知数据流
此次百度Apollo与飞桨的合作更是基于广泛的感知模型,从而更好的赋能开发者。不仅在感知模型层面进行全面打通,引入了飞桨原生推理库Paddle Inference,支持Nvidia系列显卡等多重硬件,借助于TensorRT和OpenVINO加速库,使开发者可以获得产业级的高性能推理能力。而且引入了更多的感知模型,支持单目、点云等不同模态以及检测、分割等不同任务类型,开发者可以根据需求选择模型类型并在Apollo开放平台内集成,获得更高效更便捷的开发体验。
根据模型类型,按照文档添加一个新Detector
目前Apollo开放平台也将Paddle3D中的优质模型内置到了框架中。在Paddle3D高性能模型的加持下,Apollo感知模型的丰富度与性能都实现了巨大的提升。基于Paddle3D模型库,Apollo开放平台新增了相机检测与点云检测模型。其中由Paddle3D提供的CenterPoint模型的参数量只有PointPillars模型的三分之一,CADDN模型的推理精度相较于SMOKE提升了100%。
Paddle3D作为Apollo开放平台与飞桨专为自动驾驶感知模块打造的3D视觉开发工具,全面考虑了各类输入模态(单目、点云)与多样任务类型(检测、分割),同时最大化压缩开发成本,提供自动驾驶感知模块最佳的一站式开发体验!
自动驾驶产业实践直播课
扫码海报二维码,报名直播课
即可加入技术交流群
关注【飞桨PaddlePaddle】公众号
获取更多技术内容~