类别 计算机视觉(PaddleCV)
应用 图像搜索 安防监控 自动驾驶 智慧城市 机器人视觉
YOLOv3 是由 Joseph Redmon 和 Ali Farhadi 提出的单阶段检测器, 该检测器与达到同样精度的传统目标检测方法相比,推断速度能达到接近两倍。 在我们的实现版本中使用了 Bag of Freebies for Training Object Detection Neural Networks 中提出的图像增强和label smooth等优化方法,精度优于darknet框架的实现版本,在COCO-2017数据集上,我们达到mAP(0.50:0.95)= 38.9的精度,比darknet实现版本的精度(33.0)要高5.9。 同时,在推断速度方面,基于Paddle预测库的加速方法,推断速度比darknet高30%。
# YOLOv3增强模型
---
## 简介
[YOLOv3](https://arxiv.org/abs/1804.02767) 是由 [Joseph Redmon](https://arxiv.org/search/cs?searchtype=author&query=Redmon%2C+J) 和 [Ali Farhadi](https://arxiv.org/search/cs?searchtype=author&query=Farhadi%2C+A) 提出的单阶段检测器, 该检测
器与达到同样精度的传统目标检测方法相比,推断速度能达到接近两倍.
PaddleDetection实现版本中使用了 [Bag of Freebies for Training Object Detection Neural Networks](https://arxiv.org/abs/1902.04103v3) 中提出的图像增强和label smooth等优化方法,精度优于darknet框架的实现版本,在COCO-2017数据集上,YOLOv3(DarkNet)达到`mAP(0.50:0.95)= 38.9`的精度,比darknet实现版本的精度(33.0)要高5.9。同时,在推断速度方面,基于Paddle预测库的加速方法,推断速度比darknet高30%。
在此基础上,PaddleDetection对YOLOv3进一步改进,进一步提升了速度和精度,最终在COCO mAP上可以达到43.2。
## 方法描述
1.将[YOLOv3](https://arxiv.org/pdf/1804.02767.pdf)骨架网络更换为[ResNet50-VD](https://arxiv.org/pdf/1812.01187.pdf)。ResNet50-VD网络相比原生的DarkNet53网络在速度和精度上都有一定的优势,且相较DarkNet53 ResNet系列更容易扩展,针对自己业务场景可以选择ResNet18、34、101等不同结构作为检测模型的主干网络。
2.引入[Deformable Convolution v2](https://arxiv.org/abs/1811.11168)(可变形卷积)替代原始卷积操作,Deformable Convolution已经在多个视觉任务中广泛验证过其效果,在Yolo v3增强模型中考虑到速度与精度的平衡,我们仅使用Deformable Convolution替换了主干网络中Stage5部分的3x3卷积。
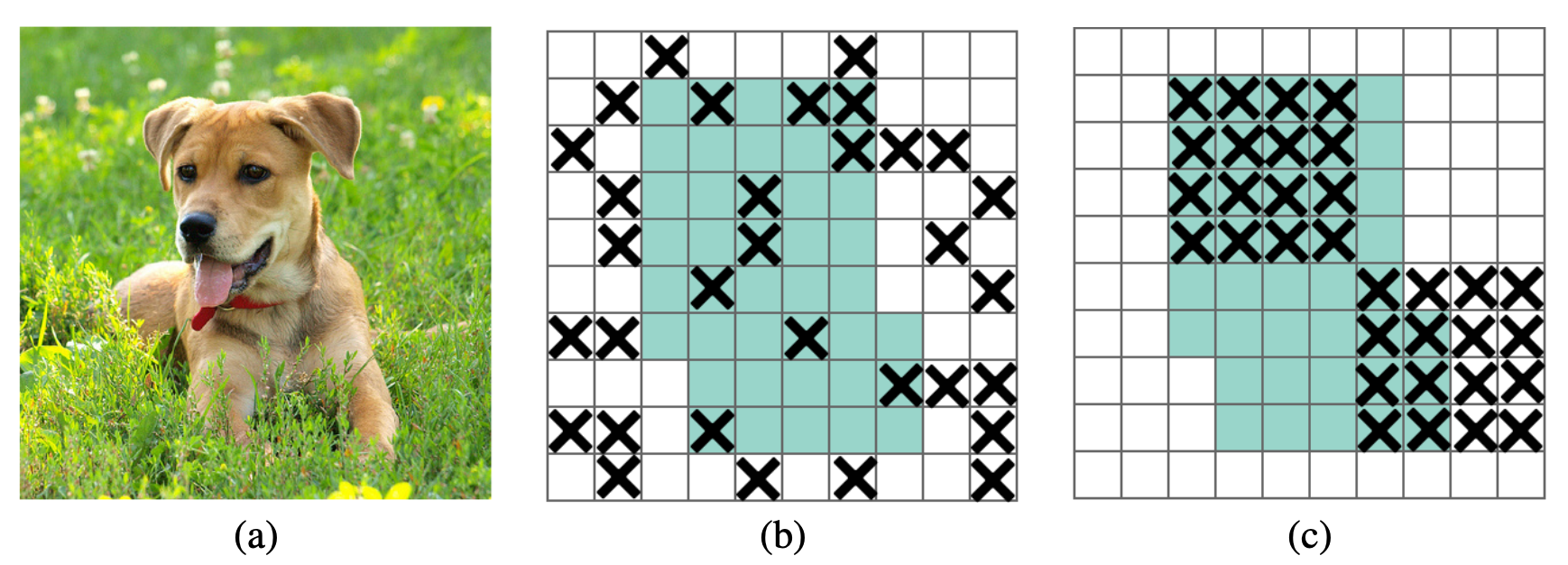
3.在FPN部分增加[DropBlock](https://arxiv.org/abs/1810.12890)模块,提高模型泛化能力。Dropout操作如下图(b)中所示是分类网络中广泛使用的增强模型泛化能力的重要手段之一。DropBlock算法相比于Dropout算法,在Drop特征的时候会集中Drop掉某一块区域,更适应于在检测任务中提高网络泛化能力。
4.Yolo v3作为一阶段检测网络,在定位精度上相比Faster RCNN,Cascade RCNN等网络结构有着其天然的劣势,增加[IoU Loss](https://arxiv.org/abs/1908.03851)分支,可以一定程度上提高BBox定位精度,缩小一阶段和两阶段检测网络的差距。
5.使用[Object365数据集](https://www.objects365.org/download.html)训练得到的模型作为coco数据集上的预训练模型,Object365数据集包含约60万张图片以及365种类别,相比coco数据集进行预训练可以进一步提高YOLOv3的精度。
## 使用方法
### 模型训练
```bash
export CUDA_VISIBLE_DEVICES=0,1,2,3,4,5,6,7
python tools/train.py -c configs/dcn/yolov3_r50vd_dcn_iouloss_obj365_pretrained_coco.yml
```
更多模型参数请使用``python tools/train.py --help``查看,或参考[训练、评估及参数说明](../tutorials/GETTING_STARTED_cn.md)文档
### 模型效果
| 模型 | 预训练模型 | 验证集 mAP | P4预测速度 | 下载 |
| :--------------------------------------: | :----------------------------------------------------------: | :--------: | :------------------------------------: | :----------------------------------------------------------: |
| YOLOv3 DarkNet | [DarkNet pretrain](https://paddle-imagenet-models-name.bj.bcebos.com/DarkNet53_pretrained.tar) | 38.9 | 原生:88.3ms
tensorRT-FP32: 42.5ms | [下载链接](https://paddlemodels.bj.bcebos.com/object_detection/yolov3_darknet.tar) |
| YOLOv3 ResNet50_vd DCN | [ImageNet pretrain](https://paddle-imagenet-models-name.bj.bcebos.com/ResNet50_vd_pretrained.tar) | 39.1 | 原生:74.4ms
tensorRT-FP32: 35.2ms | [下载链接](https://paddlemodels.bj.bcebos.com/object_detection/yolov3_r50vd_dcn_imagenet.tar) |
| YOLOv3 ResNet50_vd DCN | [Object365 pretrain](https://paddlemodels.bj.bcebos.com/object_detection/ResNet50_vd_dcn_db_obj365_pretrained.tar) | 42.5 | 原生:74.4ms
tensorRT-FP32: 35.2ms | [下载链接](https://paddlemodels.bj.bcebos.com/object_detection/yolov3_r50vd_dcn_obj365_v2.tar) |
| YOLOv3 ResNet50_vd DCN DropBlock | [Object365 pretrain](https://paddlemodels.bj.bcebos.com/object_detection/ResNet50_vd_dcn_db_obj365_pretrained.tar) | 42.8 | 原生:74.4ms
tensorRT-FP32: 35.2ms | [下载链接](https://paddlemodels.bj.bcebos.com/object_detection/yolov3_r50vd_dcn_obj365_dropblock.tar) |
| YOLOv3 ResNet50_vd DCN DropBlock IoULoss | [Object365 pretrain](https://paddlemodels.bj.bcebos.com/object_detection/ResNet50_vd_dcn_db_obj365_pretrained.tar) | 43.2 | 原生:74.4ms
tensorRT-FP32: 35.2ms | [下载链接](https://paddlemodels.bj.bcebos.com/object_detection/yolov3_r50vd_dcn_obj365_dropblock_iouloss.tar) |
