点云处理:实现PointNet点云分割
作者信息: lzzzzzm
创建日期: 2022年10月26日
摘要: 本示例在于演示如何基于 PaddlePaddle 2.3.2实现PointNet在ShapeNet数据集上进行点云分割。
1、简要介绍
点云是一种不同于图片的数据存储结构,其特有的无序性,使其在利用深度网络处理时,需要进行特殊的处理。常见的处理方法有将点云处理成体素后,以某种方式将体素转换为图片后进行处理,但这种方法往往伴随着计算量大等缺点。PointNet系列的模型在模型的设计上,考虑到了点云的无序性特点,使其可以直接对点云数据处理,大大降低了计算量。PointNet系列的模型以简单的结构,同时兼顾了点云分类,零件分割到语义解析任务。
本项目基于PointNet实现对物体零件分割功能
2、环境设置
[20]:
import os
import tqdm
import random
import numpy as np
import pandas as pd
import matplotlib.pyplot as plt
import warnings
warnings.filterwarnings("ignore", module="matplotlib")
from mpl_toolkits.mplot3d import Axes3D
# paddle相关库
import paddle
from paddle.io import Dataset
import paddle.nn.functional as F
from paddle.nn import (
Conv2D,
MaxPool2D,
Linear,
BatchNorm,
Dropout,
ReLU,
Softmax,
Sequential,
)
# 查看paddle版本
print("本项目使用paddle版本:{}".format(paddle.__version__))
本项目使用paddle版本:2.3.2
3、数据集
ShapeNet 数据集是一项持续的工作,旨在建立一个带有丰富注释的大规模 3D 形状数据集。形状网核心是完整形状网数据集的子集,具有干净的单个3D模型和手动验证的类别和对齐注释。它涵盖了55个常见的对象类别,约有51,300个独特的3D模型。
对于此示例,我们使用 PASCAL 3D+ 的 12 个对象类别之一,以飞机的零件分割为例,该类别作为 ShapenetCore 数据集的一部分包含在内。
完整的数据集下载地址:https://shapenet.cs.stanford.edu/iccv17/
[ ]:
# 解压数据集,并放到dataset这个文件夹下
!mkdir dataset
!unzip -q data/data174089/shapenet.zip -d dataset/
3.1点云数据可视化
点云数据的获取方式,一般都是使用深度相机或者雷达,其存储的形式一般为一个(N,4)的向量,其中N代表着这次采集的点云数量,4代表着其中每个点在三维的坐标x,y,z和反射强度r,但在本次的数据集中,点云的存储方式为(N,3),即不包括点云的反射强度r。
而label的存储方式则是为一个N维的向量,代表每个点具体的类别
下面,我们通过读取点云的数据和其label,对我们需要处理的数据,有一个大致的认识。
[22]:
# 可视化使用的颜色和对应label的名字
COLORS = [" ", "b", "r", "g", "pink"]
label_map = ["", "body", "wing", "tail", "engine"]
def visualize_data(point_cloud, label, title):
df = pd.DataFrame(
data={
"x": point_cloud[:, 0],
"y": point_cloud[:, 1],
"z": point_cloud[:, 2],
"label": label,
}
)
fig = plt.figure(figsize=(15, 10))
ax = plt.axes(projection="3d")
ax.scatter(df["x"], df["y"], df["z"])
for i in range(label.min(), label.max() + 1):
c_df = df[df["label"] == i]
ax.scatter(
c_df["x"],
c_df["y"],
c_df["z"],
label=label_map[i],
alpha=0.5,
c=COLORS[i],
)
ax.legend()
plt.title(title)
plt.show()
show_point_cloud_path = "dataset/shapenet/train_data/Airplane/000043.pts"
show_label_path = "dataset/shapenet/train_label/Airplane/000043.seg"
# 读取点云文件
point_cloud = np.loadtxt(show_point_cloud_path)
label = np.loadtxt(show_label_path).astype("int")
visualize_data(point_cloud, label, "label")
print("point cloud shape:{}".format(point_cloud.shape))
print("label shape:{}".format(label.shape))
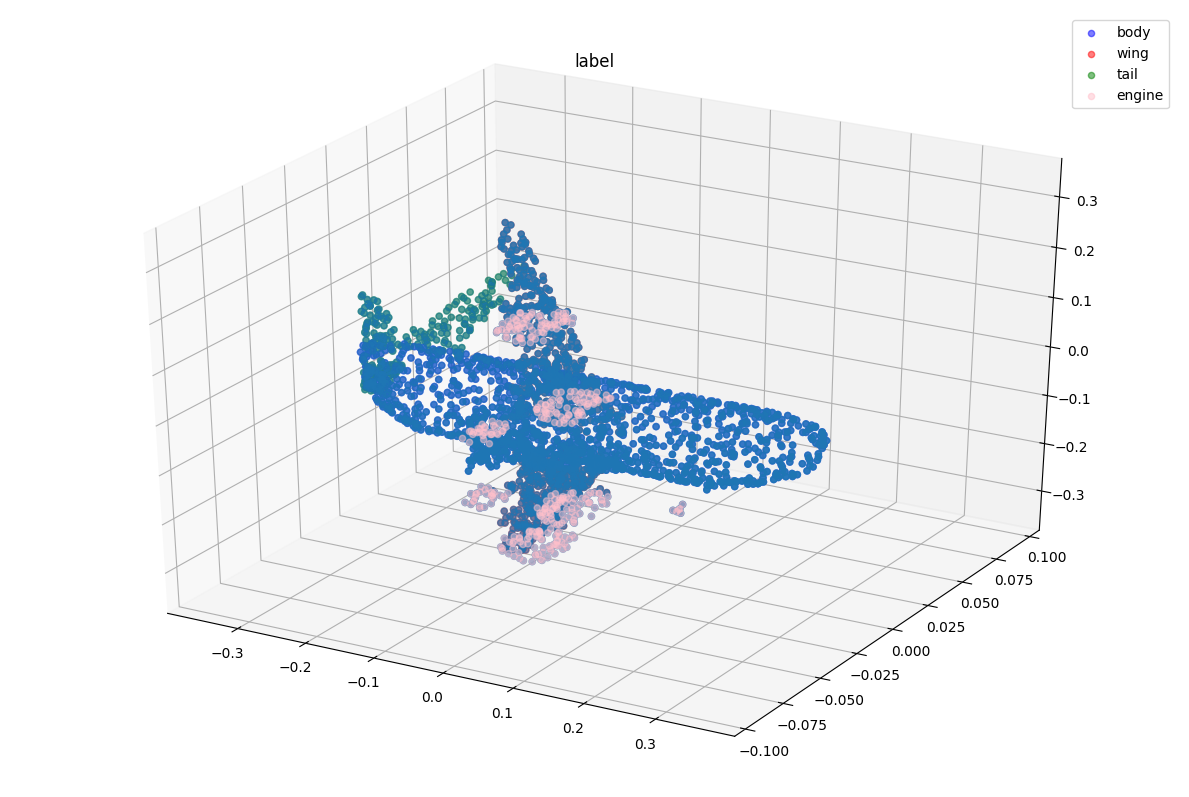
point cloud shape:(2593, 3)
label shape:(2593,)
3.2数据获取与预处理
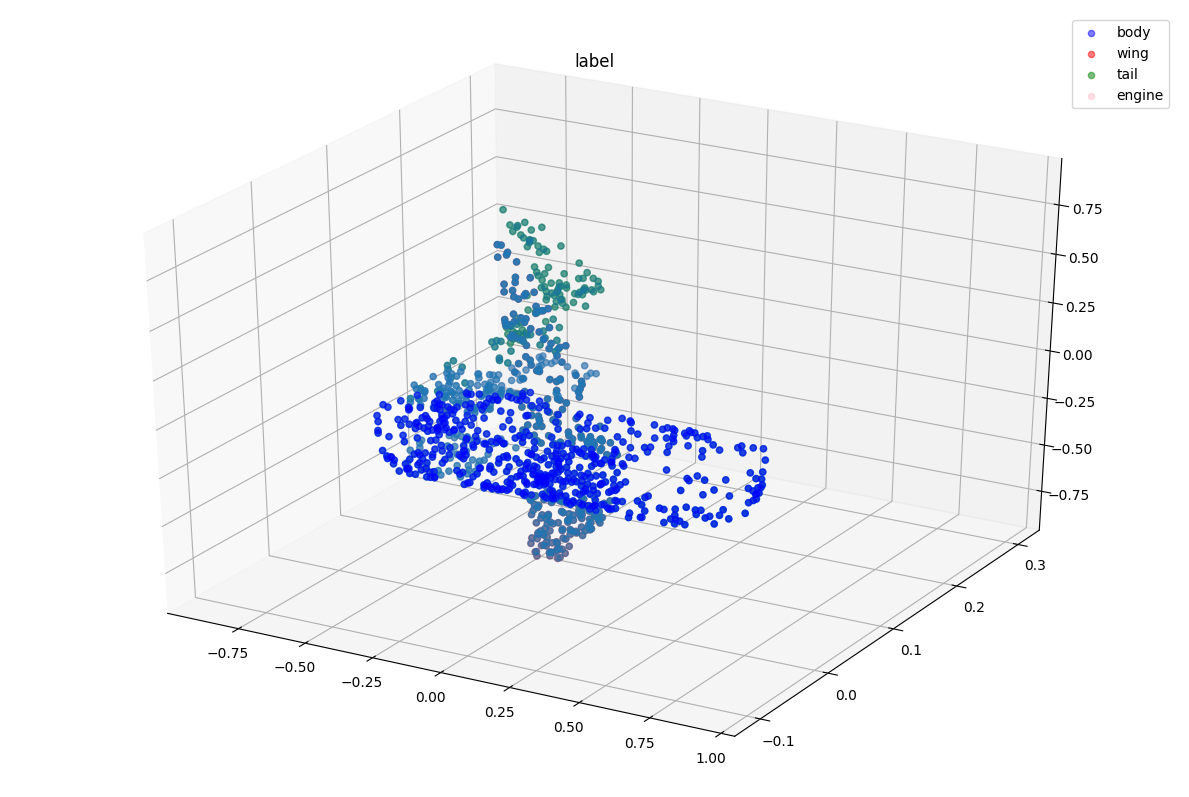
根据上面的可视化分析,我们可以知道,每个数据中点云N的数量是不同的,这不利于我们进行后续的处理,所以这里对数据集中的点云进行了随机采样,使每个点云的数量一致,此外,我们也将点云的坐标进行了正则化操作,最后将处理好的点云存储在内存中,方便后续dataset的构建。
PS:此数据集中不仅包含Airplane类别,还包括Bag,Cap,Car和Chair类别,有兴趣可以自己修改数据集路径进行使用。
[23]:
data_path = "dataset/shapenet/train_data/Airplane"
label_path = "dataset/shapenet/train_label/Airplane"
# 采样点
NUM_SAMPLE_POINTS = 1024
# 存储点云与label
point_clouds = []
point_clouds_labels = []
file_list = os.listdir(data_path)
for file_name in tqdm.tqdm(file_list):
# 获取label和data的地址
label_name = file_name.replace(".pts", ".seg")
point_cloud_file_path = os.path.join(data_path, file_name)
label_file_path = os.path.join(label_path, label_name)
# 读取label和data
point_cloud = np.loadtxt(point_cloud_file_path)
label = np.loadtxt(label_file_path).astype("int")
# 如果本身的点少于需要采样的点,则直接去除
if len(point_cloud) < NUM_SAMPLE_POINTS:
continue
# 采样
num_points = len(point_cloud)
# 确定随机采样的index
sampled_indices = random.sample(list(range(num_points)), NUM_SAMPLE_POINTS)
# 点云采样
sampled_point_cloud = np.array([point_cloud[i] for i in sampled_indices])
# label采样
sampled_label_cloud = np.array([label[i] for i in sampled_indices])
# 正则化
norm_point_cloud = sampled_point_cloud - np.mean(
sampled_point_cloud, axis=0
)
norm_point_cloud /= np.max(np.linalg.norm(norm_point_cloud, axis=1))
# 存储
point_clouds.append(norm_point_cloud)
point_clouds_labels.append(sampled_label_cloud)
100%|██████████| 1958/1958 [00:55<00:00, 35.41it/s]
可视化看一下采样后的点云和之前的区别。
[24]:
visualize_data(point_clouds[0], point_clouds_labels[0], "label")
3.3数据集定义
在Paddle中,数据集的定义只需要完成以下四步即可:
paddle.io.Dataset的继承
构造函数的实现,主要完成一些初始化
__gtitem__方法的实现,即定义index时,可以返回对应的单条数据,包括训练数据和对应的标签
__len__方法的实现,即获取数据的大小
此外,这里还对数据集进行了训练集和验证集的划分,划分比例为验证集占总体的20%,并将定义好的数据集,通过paddle.io.DataLoader进行迭代器的封装,方便训练过程数据的读取操作。
[25]:
class MyDataset(Dataset):
"""
步骤一:继承paddle.io.Dataset类
"""
def __init__(self, data, label):
"""
步骤二:实现构造函数,定义数据集大小
"""
super(MyDataset, self).__init__()
self.data = data
self.label = label
def __getitem__(self, index):
"""
步骤三:实现__getitem__方法,定义指定index时如何获取数据,并返回单条数据(训练数据,对应的标签)
"""
data = self.data[index]
# 减1是因为原始label中是从1开始算类别数的
label = self.label[index] - 1
data = np.reshape(data, (1, 1024, 3))
return data, label
def __len__(self):
"""
步骤四:实现__len__方法,返回数据集总数目
"""
return len(self.data)
# 数据集划分
VAL_SPLIT = 0.2
split_index = int(len(point_clouds) * (1 - VAL_SPLIT))
train_point_clouds = point_clouds[:split_index]
train_label_cloud = point_clouds_labels[:split_index]
total_training_examples = len(train_point_clouds)
val_point_clouds = point_clouds[split_index:]
val_label_cloud = point_clouds_labels[split_index:]
print("Num train point clouds:", len(train_point_clouds))
print("Num train point cloud labels:", len(train_label_cloud))
print("Num val point clouds:", len(val_point_clouds))
print("Num val point cloud labels:", len(val_label_cloud))
# 测试定义的数据集
train_dataset = MyDataset(train_point_clouds, train_label_cloud)
val_dataset = MyDataset(val_point_clouds, val_label_cloud)
print("=============custom dataset test=============")
for data, label in train_dataset:
print("data shape:{} \nlabel shape:{}".format(data.shape, label.shape))
break
# Batch_size 大小
BATCH_SIZE = 64
# # 数据加载
train_loader = paddle.io.DataLoader(
train_dataset, batch_size=BATCH_SIZE, shuffle=True
)
val_loader = paddle.io.DataLoader(
val_dataset, batch_size=BATCH_SIZE, shuffle=False
)
Num train point clouds: 1566
Num train point cloud labels: 1566
Num val point clouds: 392
Num val point cloud labels: 392
=============custom dataset test=============
data shape:(1, 1024, 3)
label shape:(1024,)
4、模型组网
在模型组网前,先对本次项目使用的PointNet网络做一个简单的的介绍。
4.1 PointNet介绍
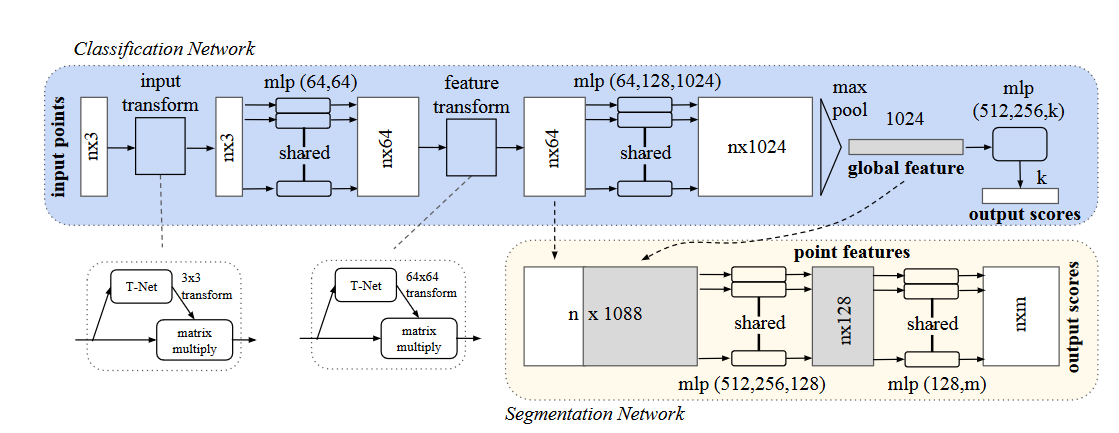
PointNet网络的设计思路,主要解决以下三个问题:点云的无序性,点云之间的交互性和点云的变换不变性。
点云的无序性:对称函数(symmetry function)的应用,如加法、乘法和取最大值函数等,在PointNet则是采用了maxpooling(最大值汇聚)的方法
点云的交互性: 在分割网络的分支里,可以看到其将某一层的信息和经过maxpooling得到的全局信息进行concate来达到全局和局部信息的交互
点云的变换不变性: 在点云中,不论怎么旋转应该都不会改变其属性。在此前有人设计变换矩阵,以数据增强的方法来解决这个问题。而作者这里直接将这个变换矩阵的学习也融入到网络中,设计了input transform结构。
另外,由于网络最终要使用maxpooling来进行汇聚特征,而原始的点云是(N,3)的特征,也即只有3维特征,所以作者利用了MLP来进行升维后再进行汇聚的操作。
在分割网络里,作者通过concate全局特征和局部特征,构造一个语义特征更强的特征形式,后面就是常规的通过MLP网络进行降维后生成预测点云。
更加详细的细节,可以查看原论文和下面的代码:论文地址
其中代码中的网络定义,对应网络细节如下:
input_transform_net+input_fc:对应T-Net,后续reshape到3x3做为变换矩阵和输入进行变换
mlp:对应升维的MLP层
seg_net:对应Segmentation Network中一系列的MLP层
其中代码中的MLP层,均使用了1x1的卷积层来进行代替。
4.2 Paddle模型组网
Paddle中的组网和torch中无大致区别,继承nn.Layer后,重写前向传播forward即可
[26]:
class PointNet(paddle.nn.Layer):
def __init__(self, name_scope="PointNet_", num_classes=4, num_point=1024):
super(PointNet, self).__init__()
self.num_point = num_point
self.input_transform_net = Sequential(
Conv2D(1, 64, (1, 3)),
BatchNorm(64),
ReLU(),
Conv2D(64, 128, (1, 1)),
BatchNorm(128),
ReLU(),
Conv2D(128, 1024, (1, 1)),
BatchNorm(1024),
ReLU(),
MaxPool2D((num_point, 1)),
)
self.input_fc = Sequential(
Linear(1024, 512),
ReLU(),
Linear(512, 256),
ReLU(),
Linear(
256,
9,
weight_attr=paddle.framework.ParamAttr(
initializer=paddle.nn.initializer.Assign(
paddle.zeros((256, 9))
)
),
bias_attr=paddle.framework.ParamAttr(
initializer=paddle.nn.initializer.Assign(
paddle.reshape(paddle.eye(3), [-1])
)
),
),
)
self.mlp_1 = Sequential(
Conv2D(1, 64, (1, 3)),
BatchNorm(64),
ReLU(),
Conv2D(64, 64, (1, 1)),
BatchNorm(64),
ReLU(),
)
self.feature_transform_net = Sequential(
Conv2D(64, 64, (1, 1)),
BatchNorm(64),
ReLU(),
Conv2D(64, 128, (1, 1)),
BatchNorm(128),
ReLU(),
Conv2D(128, 1024, (1, 1)),
BatchNorm(1024),
ReLU(),
MaxPool2D((num_point, 1)),
)
self.feature_fc = Sequential(
Linear(1024, 512),
ReLU(),
Linear(512, 256),
ReLU(),
Linear(256, 64 * 64),
)
self.mlp_2 = Sequential(
Conv2D(64, 64, (1, 1)),
BatchNorm(64),
ReLU(),
Conv2D(64, 128, (1, 1)),
BatchNorm(128),
ReLU(),
Conv2D(128, 1024, (1, 1)),
BatchNorm(1024),
ReLU(),
)
self.seg_net = Sequential(
Conv2D(1088, 512, (1, 1)),
BatchNorm(512),
ReLU(),
Conv2D(512, 256, (1, 1)),
BatchNorm(256),
ReLU(),
Conv2D(256, 128, (1, 1)),
BatchNorm(128),
ReLU(),
Conv2D(128, 128, (1, 1)),
BatchNorm(128),
ReLU(),
Conv2D(128, num_classes, (1, 1)),
Softmax(axis=1),
)
def forward(self, inputs):
batchsize = inputs.shape[0]
t_net = self.input_transform_net(inputs)
t_net = paddle.squeeze(t_net)
t_net = self.input_fc(t_net)
t_net = paddle.reshape(t_net, [batchsize, 3, 3])
x = paddle.reshape(inputs, shape=(batchsize, 1024, 3))
x = paddle.matmul(x, t_net)
x = paddle.unsqueeze(x, axis=1)
x = self.mlp_1(x)
t_net = self.feature_transform_net(x)
t_net = paddle.squeeze(t_net)
t_net = self.feature_fc(t_net)
t_net = paddle.reshape(t_net, [batchsize, 64, 64])
x = paddle.reshape(x, shape=(batchsize, 64, 1024))
x = paddle.transpose(x, (0, 2, 1))
x = paddle.matmul(x, t_net)
x = paddle.transpose(x, (0, 2, 1))
x = paddle.unsqueeze(x, axis=-1)
point_feat = x
x = self.mlp_2(x)
x = paddle.max(x, axis=2)
global_feat_expand = paddle.tile(
paddle.unsqueeze(x, axis=1), [1, self.num_point, 1, 1]
)
x = paddle.concat([point_feat, global_feat_expand], axis=1)
x = self.seg_net(x)
x = paddle.squeeze(x, axis=-1)
x = paddle.transpose(x, (0, 2, 1))
return x
4.3 模型可视化
[28]:
pointnet = PointNet()
paddle.summary(pointnet, (64, 1, 1024, 3))
----------------------------------------------------------------------------
Layer (type) Input Shape Output Shape Param #
============================================================================
Conv2D-17 [[64, 1, 1024, 3]] [64, 64, 1024, 1] 256
BatchNorm-16 [[64, 64, 1024, 1]] [64, 64, 1024, 1] 256
ReLU-20 [[64, 64, 1024, 1]] [64, 64, 1024, 1] 0
Conv2D-18 [[64, 64, 1024, 1]] [64, 128, 1024, 1] 8,320
BatchNorm-17 [[64, 128, 1024, 1]] [64, 128, 1024, 1] 512
ReLU-21 [[64, 128, 1024, 1]] [64, 128, 1024, 1] 0
Conv2D-19 [[64, 128, 1024, 1]] [64, 1024, 1024, 1] 132,096
BatchNorm-18 [[64, 1024, 1024, 1]] [64, 1024, 1024, 1] 4,096
ReLU-22 [[64, 1024, 1024, 1]] [64, 1024, 1024, 1] 0
MaxPool2D-3 [[64, 1024, 1024, 1]] [64, 1024, 1, 1] 0
Linear-7 [[64, 1024]] [64, 512] 524,800
ReLU-23 [[64, 512]] [64, 512] 0
Linear-8 [[64, 512]] [64, 256] 131,328
ReLU-24 [[64, 256]] [64, 256] 0
Linear-9 [[64, 256]] [64, 9] 2,313
Conv2D-20 [[64, 1, 1024, 3]] [64, 64, 1024, 1] 256
BatchNorm-19 [[64, 64, 1024, 1]] [64, 64, 1024, 1] 256
ReLU-25 [[64, 64, 1024, 1]] [64, 64, 1024, 1] 0
Conv2D-21 [[64, 64, 1024, 1]] [64, 64, 1024, 1] 4,160
BatchNorm-20 [[64, 64, 1024, 1]] [64, 64, 1024, 1] 256
ReLU-26 [[64, 64, 1024, 1]] [64, 64, 1024, 1] 0
Conv2D-22 [[64, 64, 1024, 1]] [64, 64, 1024, 1] 4,160
BatchNorm-21 [[64, 64, 1024, 1]] [64, 64, 1024, 1] 256
ReLU-27 [[64, 64, 1024, 1]] [64, 64, 1024, 1] 0
Conv2D-23 [[64, 64, 1024, 1]] [64, 128, 1024, 1] 8,320
BatchNorm-22 [[64, 128, 1024, 1]] [64, 128, 1024, 1] 512
ReLU-28 [[64, 128, 1024, 1]] [64, 128, 1024, 1] 0
Conv2D-24 [[64, 128, 1024, 1]] [64, 1024, 1024, 1] 132,096
BatchNorm-23 [[64, 1024, 1024, 1]] [64, 1024, 1024, 1] 4,096
ReLU-29 [[64, 1024, 1024, 1]] [64, 1024, 1024, 1] 0
MaxPool2D-4 [[64, 1024, 1024, 1]] [64, 1024, 1, 1] 0
Linear-10 [[64, 1024]] [64, 512] 524,800
ReLU-30 [[64, 512]] [64, 512] 0
Linear-11 [[64, 512]] [64, 256] 131,328
ReLU-31 [[64, 256]] [64, 256] 0
Linear-12 [[64, 256]] [64, 4096] 1,052,672
Conv2D-25 [[64, 64, 1024, 1]] [64, 64, 1024, 1] 4,160
BatchNorm-24 [[64, 64, 1024, 1]] [64, 64, 1024, 1] 256
ReLU-32 [[64, 64, 1024, 1]] [64, 64, 1024, 1] 0
Conv2D-26 [[64, 64, 1024, 1]] [64, 128, 1024, 1] 8,320
BatchNorm-25 [[64, 128, 1024, 1]] [64, 128, 1024, 1] 512
ReLU-33 [[64, 128, 1024, 1]] [64, 128, 1024, 1] 0
Conv2D-27 [[64, 128, 1024, 1]] [64, 1024, 1024, 1] 132,096
BatchNorm-26 [[64, 1024, 1024, 1]] [64, 1024, 1024, 1] 4,096
ReLU-34 [[64, 1024, 1024, 1]] [64, 1024, 1024, 1] 0
Conv2D-28 [[64, 1088, 1024, 1]] [64, 512, 1024, 1] 557,568
BatchNorm-27 [[64, 512, 1024, 1]] [64, 512, 1024, 1] 2,048
ReLU-35 [[64, 512, 1024, 1]] [64, 512, 1024, 1] 0
Conv2D-29 [[64, 512, 1024, 1]] [64, 256, 1024, 1] 131,328
BatchNorm-28 [[64, 256, 1024, 1]] [64, 256, 1024, 1] 1,024
ReLU-36 [[64, 256, 1024, 1]] [64, 256, 1024, 1] 0
Conv2D-30 [[64, 256, 1024, 1]] [64, 128, 1024, 1] 32,896
BatchNorm-29 [[64, 128, 1024, 1]] [64, 128, 1024, 1] 512
ReLU-37 [[64, 128, 1024, 1]] [64, 128, 1024, 1] 0
Conv2D-31 [[64, 128, 1024, 1]] [64, 128, 1024, 1] 16,512
BatchNorm-30 [[64, 128, 1024, 1]] [64, 128, 1024, 1] 512
ReLU-38 [[64, 128, 1024, 1]] [64, 128, 1024, 1] 0
Conv2D-32 [[64, 128, 1024, 1]] [64, 4, 1024, 1] 516
Softmax-2 [[64, 4, 1024, 1]] [64, 4, 1024, 1] 0
============================================================================
Total params: 3,559,501
Trainable params: 3,540,301
Non-trainable params: 19,200
----------------------------------------------------------------------------
Input size (MB): 0.75
Forward/backward pass size (MB): 7208.50
Params size (MB): 13.58
Estimated Total Size (MB): 7222.83
----------------------------------------------------------------------------
[28]:
{'total_params': 3559501, 'trainable_params': 3540301}
5、模型训练
模型训练中使用的参数如下:
优化器:Adam,其中weight_decay=0.001
损失函数:CrossEntropyLoss
训练轮数:epoch_num=50
保存轮数:save_interval=2
模型保存地址:output_dir='./output'
[ ]:
# 创建模型
model = PointNet()
model.train()
# 优化器定义
optim = paddle.optimizer.Adam(parameters=model.parameters(), weight_decay=0.001)
# 损失函数定义
loss_fn = paddle.nn.CrossEntropyLoss()
# 评价指标定义
m = paddle.metric.Accuracy()
# 训练轮数
epoch_num = 50
# 每多少个epoch保存
save_interval = 2
# 每多少个epoch验证
val_interval = 2
best_acc = 0
# 模型保存地址
output_dir = "./output"
if not os.path.exists(output_dir):
os.makedirs(output_dir)
# 训练过程
plot_acc = []
plot_loss = []
for epoch in range(epoch_num):
total_loss = 0
for batch_id, data in enumerate(train_loader()):
inputs = paddle.to_tensor(data[0], dtype="float32")
labels = paddle.to_tensor(data[1], dtype="int64")
predicts = model(inputs)
# 计算损失和反向传播
loss = loss_fn(predicts, labels)
total_loss = total_loss + loss.numpy()[0]
loss.backward()
# 计算acc
predicts = paddle.reshape(
predicts, (predicts.shape[0] * predicts.shape[1], -1)
)
labels = paddle.reshape(labels, (labels.shape[0] * labels.shape[1], 1))
correct = m.compute(predicts, labels)
m.update(correct)
# 优化器更新
optim.step()
optim.clear_grad()
avg_loss = total_loss / batch_id
plot_loss.append(avg_loss)
print(
"epoch: {}/{}, loss is: {}, acc is:{}".format(
epoch, epoch_num, avg_loss, m.accumulate()
)
)
m.reset()
# 保存
if epoch % save_interval == 0:
model_name = str(epoch)
paddle.save(
model.state_dict(),
"./output/PointNet_{}.pdparams".format(model_name),
)
paddle.save(
optim.state_dict(), "./output/PointNet_{}.pdopt".format(model_name)
)
# 训练中途验证
if epoch % val_interval == 0:
model.eval()
for batch_id, data in enumerate(val_loader()):
inputs = paddle.to_tensor(data[0], dtype="float32")
labels = paddle.to_tensor(data[1], dtype="int64")
predicts = model(inputs)
predicts = paddle.reshape(
predicts, (predicts.shape[0] * predicts.shape[1], -1)
)
labels = paddle.reshape(
labels, (labels.shape[0] * labels.shape[1], 1)
)
correct = m.compute(predicts, labels)
m.update(correct)
val_acc = m.accumulate()
plot_acc.append(val_acc)
if val_acc > best_acc:
best_acc = val_acc
print(
"===================================val==========================================="
)
print("val best epoch in:{}, best acc:{}".format(epoch, best_acc))
print(
"===================================train==========================================="
)
paddle.save(model.state_dict(), "./output/best_model.pdparams")
paddle.save(optim.state_dict(), "./output/best_model.pdopt")
m.reset()
model.train()
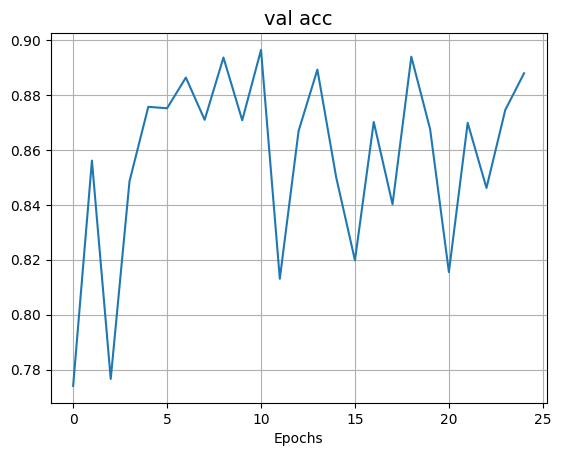
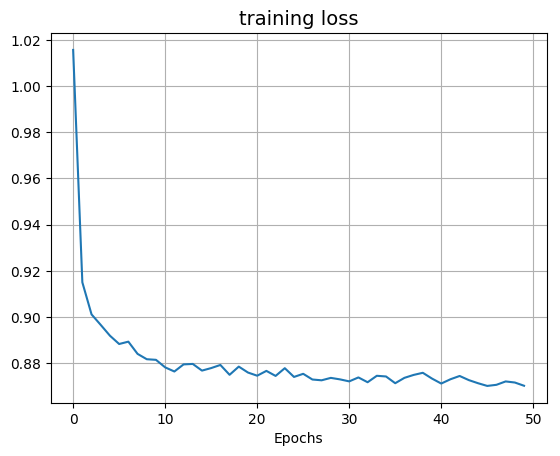
可视化模型训练过程
[30]:
def plot_result(item, title):
plt.figure()
plt.xlabel("Epochs")
plt.plot(item)
plt.title(title, fontsize=14)
plt.grid()
plt.show()
plot_result(plot_acc, "val acc")
plot_result(plot_loss, "training loss")
6、模型预测
[32]:
ckpt_path = "output/best_model.pdparams"
para_state_dict = paddle.load(ckpt_path)
# 加载网络和参数
model = PointNet()
model.set_state_dict(para_state_dict)
model.eval()
# 加载数据集
point_cloud = point_clouds[0]
show_point_cloud = point_cloud
point_cloud = paddle.to_tensor(
np.reshape(point_cloud, (1, 1, 1024, 3)), dtype="float32"
)
label = point_clouds_labels[0]
# 前向推理
preds = model(point_cloud)
show_pred = paddle.argmax(preds, axis=-1).numpy() + 1
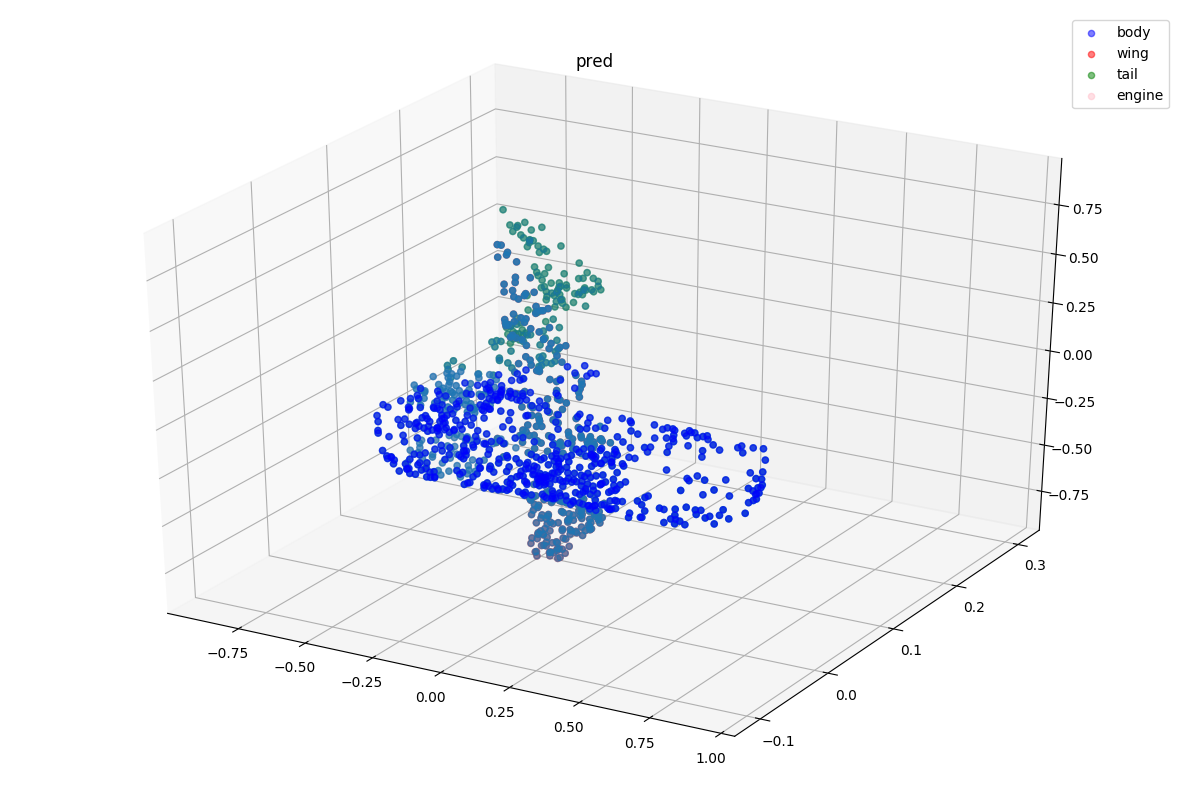
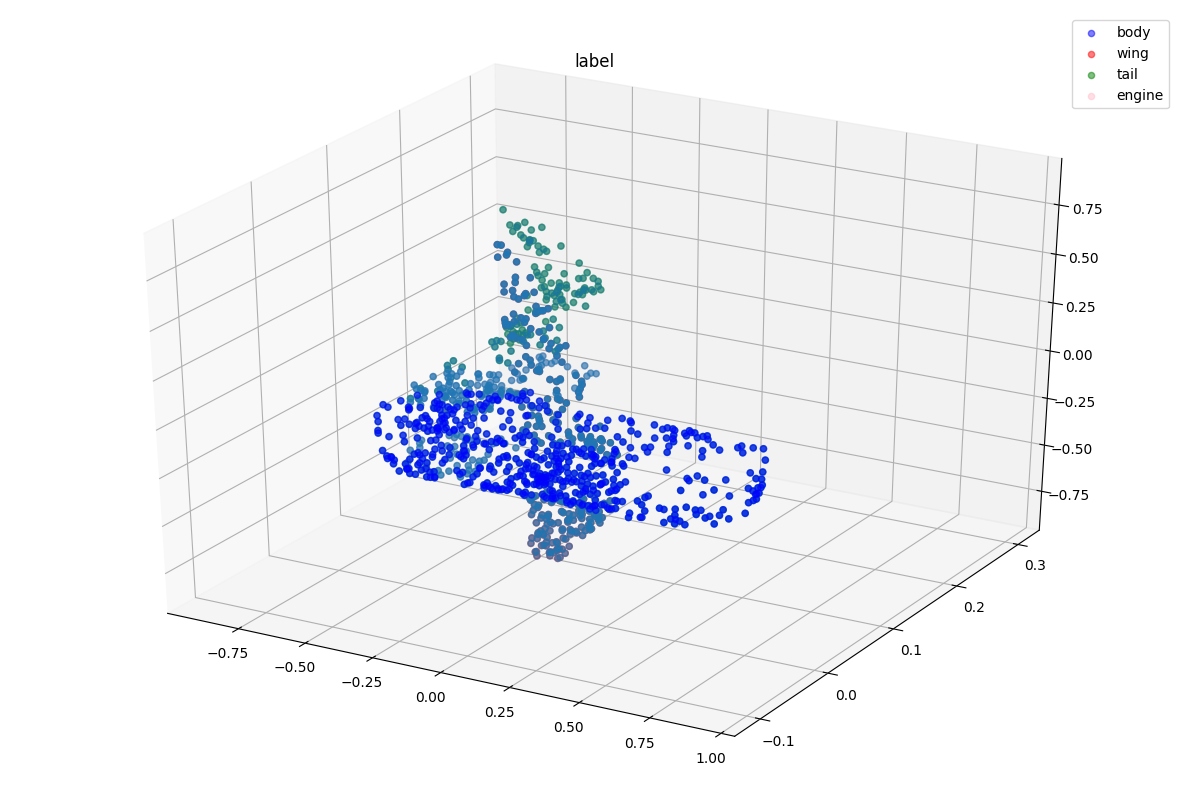
可视化结果
[33]:
visualize_data(show_point_cloud, show_pred[0], "pred")
visualize_data(show_point_cloud, label, "label")
7、总结
本项目从点云数据的分析出发,利用Paddle框架,实现了数据集构建,模型组网,训练和预测全流程开发,实现了对于点云数据的part segmentation任务